The final configuration of the “Mars Rover” robot to be used at tonight’s Summer Stars Party at the Dominion Astrophysical Observatory.
Blog
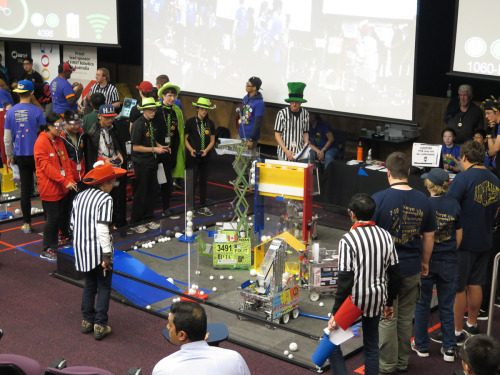
“Mars Rover” at Centre of the Universe, August 8
The FIX IT team will be at the DAO Summer Star party this coming Saturday August 8th at the Dominion Astrophysical Observatory (formerly The Centre of the Universe) at 5071 West Saanich Rd. We will have a small display as well as a “Mars Rover” of our own construction to drive around, which has a drill on the front as well a grabber.
Continue reading ““Mars Rover” at Centre of the Universe, August 8”
Australia/Asia Pacific Invitational Final Results
We were quarter-finalists in Australia—ranked 9th out of 32 overall—and won the Think Award for the “Team that best reflects the journey the team took as they experienced the engineering design process during the build season”.
Continue reading “Australia/Asia Pacific Invitational Final Results”
Australia FIRST: Day 2
Monday was a good day. Our team had lots of fun and won 6/8 matches. We’re ranked 5th!
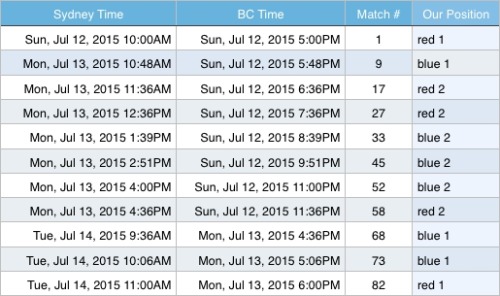
Australia FIRST matches schedule
Here is the schedule of matches for Monday and Tuesday, Australia time, with respective BC Times:
Meanwhile, back in Victoria…
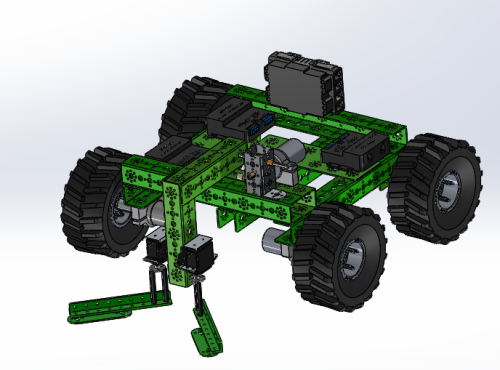
Alec and Guy have been working on the robot for the demonstration at the Prototype Equipment Design demonstration later this month (July 24).
Video feeds for Australia FIRST
Australia FIRST: Day 1

Lots of highs and lows today.
FTC Australia Competition: Day 0

The team spend some time checking out our robot, Larry. He traveled fairly well, but there were a few things to do.
Then we had some time to explore Sydney. Here’s a picture of the team representatives—Jack, Helen, and Duncan—with the Opera House in the background.
Tonight we’re practising for the judging, and then it’s early to bed. The tournament starts at 8am tomorrow morning!
Team develops image-processing software for the robot
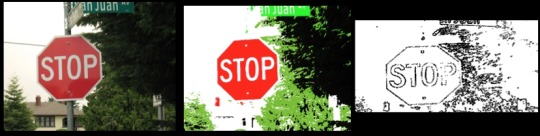
On the software side, Guy and Alec have been busy this summer researching various projects. The first of these is a Java-based image processing library which allows the robot to recognize its surroundings using a cellphone camera.